
Robot, Me
2018, Wearable Tech | Product Design, New York | Duration: 3 weeks
Interaction DesignWearable TechSpeculative DesignPhysical ComputingCyborgA trainable robot arm for the future us
"Robot, Me" tackles the relationship we have with robots by making a unique, personal, and trainable robot arm. This speculative robot arm helps users with easy tasks when they need both of their human hands to text and email.
CHALLENGES AND GOALS
Building a friendly looking robot arm
Users are able to control it wirelessly
How to build a robot arm without knowledge of 3D printing
SOLUTION
I assembled servo motors and Arduino to a plastic robot arm I purchased in Toys“R” Us. I sew five flex sensors and five wireless modules onto a glove to send hand gesture signals to the servo motors in the robot arm.

Major Major Showcase | The robot arm holds the bag of chips for the user when his both hands are occupied.
CONCEPT
Inspired by the fear of being replaced by robots in the future, my project looks at robots and AI in a positive way.
Can robots be our friends?
How might robots makes us more human
SKETCH

Sketch | Sketches of how to wear the robot arm and exploring the possible shapes of the hand.
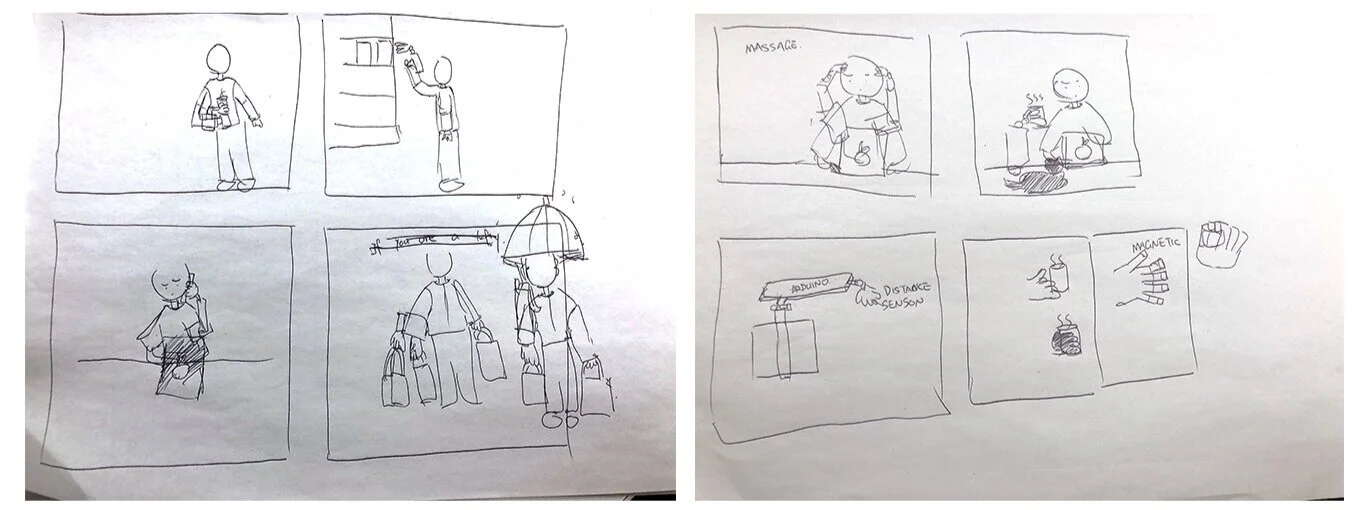
Storyboard | Scenarios when human might need an extra arm.
PROTOTYPES

First Prototype | A cardboard robot arm with servo motor.
FIRST PROTOTYPE FEEDBACK
The first prototype I build it referring to hydraulic robotic arm. Using cardboard prototype to test out how to move the fingers with fishing lines and plastic straws.
From this prototype I have figured out the right code for the servo motors. The best distance between each servo motor is 2.5 inches.
"It looks cool but fragile."
- User
Second Prototype | A programmed robot arm that could simply grab objects and hold them for 5 seconds.
SECOND PROTOTYPE FEEDBACK
I cut open a plastic robot arm and hooked the fishing lines onto each finger. The fingers move in a pattern that I set with the programed Arduino Uno board. I also cut the handle in half and placed them next to the servo motors to five the forearm more support.
“ Why couldn’t the robot arm do more for me?”
“ How do I control the robot arm? With my phone?”
“If I were to train my robot arm, I would want to physically teach it rather than hit buttons on my phone.”
- Users
FINAL PROTOTYPE

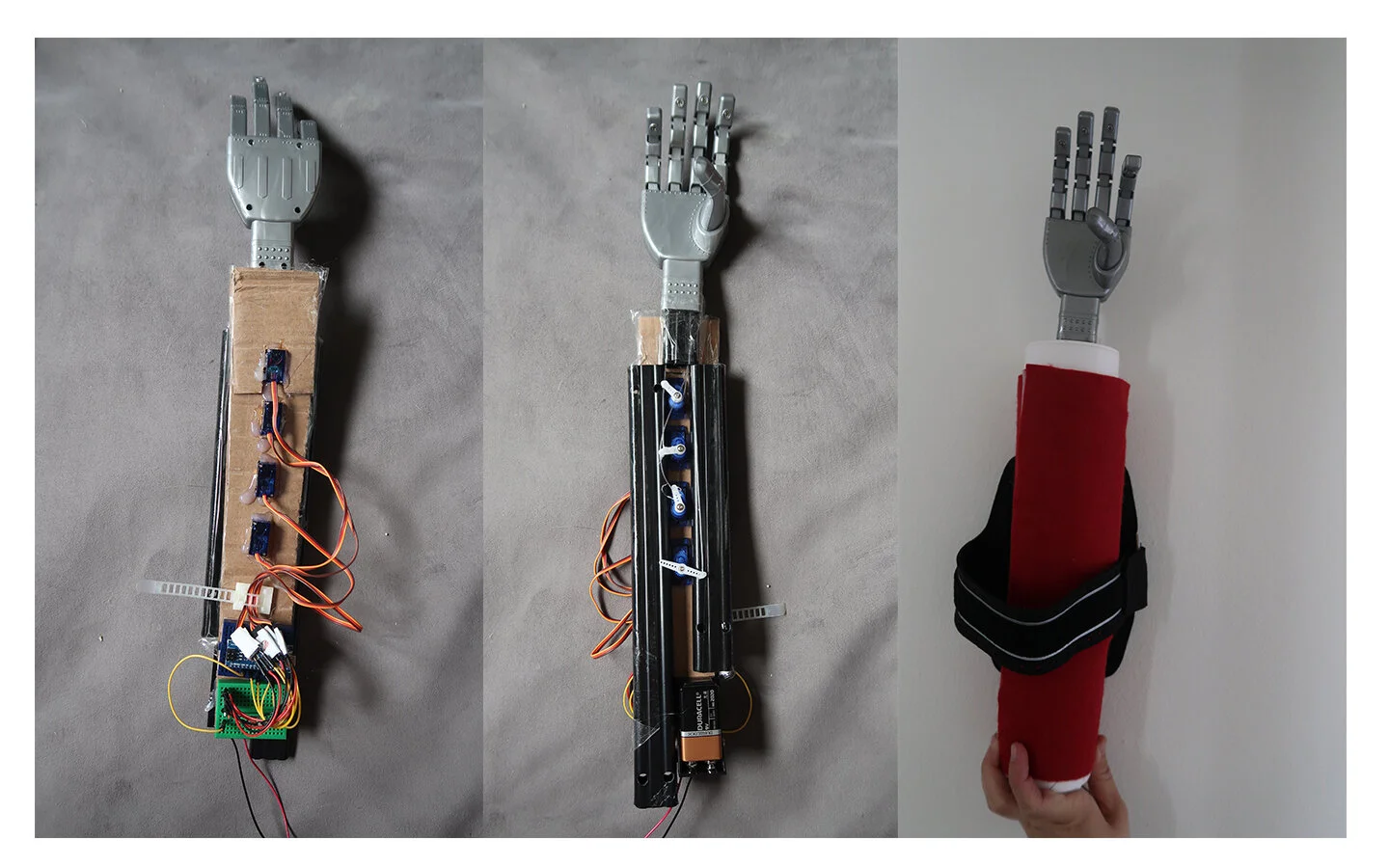
Final Prototype | Instead of lining up the servo motor, I have carefully put two of them in a row.

Final Prototype | Added an opening for users to fix the robot when they need to.

Wireless Training Glove | Using flex sensors and wireless modules to communicate wirelessly with robot arm.
THE RESULT
Showcased in Major Major Show
Reached more than 50 users from age 8 - 46.