










"Robot, Me" explores the co-existence between human and robot. The Robot-Me robot arm is a trainable and customized robot arm that gives us a hand (no pun intended) whenever we needed. This portable robot arm assists us with anything from coffee cup holding to shoulder massaging.
It used to be science fiction scenarios which part of human’s body was made of mechanical elements. As in 2015, it is reported that as much as 50,000 people have a part of their body implanted with the digital device. Cyborg is commonly used to give representation to people with disabilities. Some beliefs for the people who own a smartphone is already a cyborg. We are living with a digital version of ourselves online that perform as a partial version ourselves in the form of emails, social media, and things that we do online.
My target audience is those people who are always on their phones. Their hands are always occupied by their phones that they would sometimes give up holding onto the subway handle to continue to focus on their phones. They are scared of missing out on new information and being replaced by robots in the future. They keep themselves up to date on technology.
In my project, I would like to focus on this loving relationship we have with robots by making a unique, personal, and trainable robot arm. The speculative robot arm helps users with easy tasks when they need to dominate their hands to text and email.
I am giving users options to train and customize an AI robot arm to make them think of their current relationship with their smart robot in hand. Most people are scared of the future when our life is so heavily engaged with robots that human will have no control over our own life. My project is to look at robots and AI in a positive way which robots can also be our friends and family.
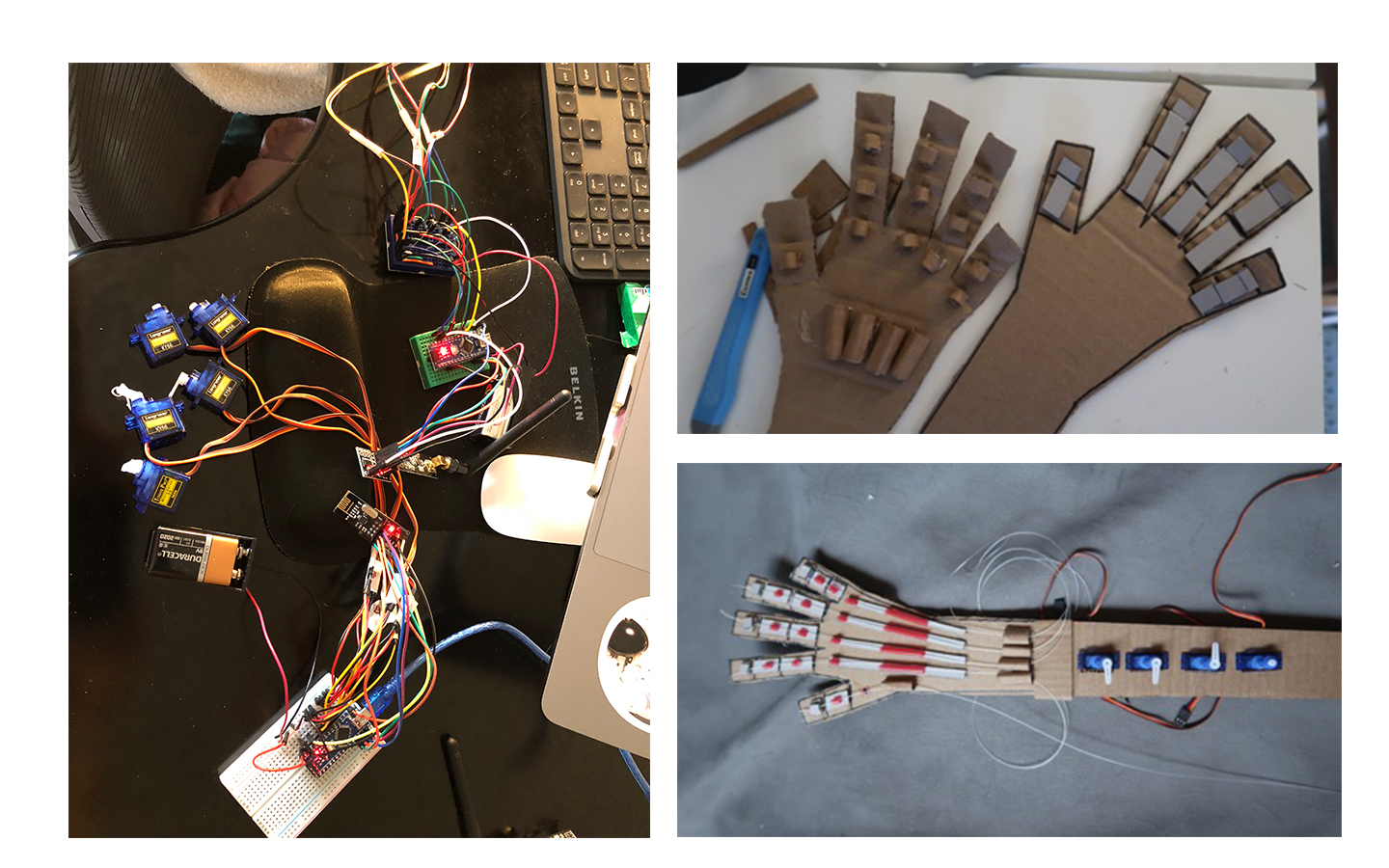
To better understand how human’s finger move, I build my first prototype referring to hydraulic robotic arm tutorials I found on YouTube. I made the first hand with cardboard only. Using the cardboard to hold the joint breaks the threads very easily. I made the second cardboard prototype with straw to hold the joints instead.
I first test out the servo motor with four servo motors lined up about 2.5’ away from the palm. It worked out well. The straw came off easily.
I decided to purchase a plastic robot arm and cut it open since I am lacking knowledge and experience in 3D printing. I cut the handle in half and placed them next to the servo motors to give the forearm more support.
I brought in the robot arm could simply perform the task of grabbing objects to our Major Major show. One of the feedbacks I got in the show was “why couldn’t the robot arm do more for me?”.
At first, I was thinking putting a screen on the arm, so users can control the robot by tapping the screen. Later, I eliminated the screen because most people think it is not necessary to control with the screen if we can train the arm with an app on our phone.
Right after the show, I went to purchase five flex sensor and a few wireless modules. I want to build something for people to control the robot arm wirelessly. I sewed the flex sensors, wireless module and Arduino on a glove to secure everything.
From the previous prototype I have learnt that the distance from the fingertip to the servo motor as well as the angle of the servo motor will affect how much the fingers will move. I put the servo motor to the side by side instead of lining up. By placing the servo motor side by side, the distance from the fingertip to the motor has been shortened. At the same time, the fish line will not overlap as much. It reduced the risk of breaking the fish lines. The harder the strings pull, the faster the fingers move, and the tighter the arms hold an object.